Автоматизированная система управления парковочным комплексом (АСУПК)
Система АСУПК предназначенная для управления оборудованием парковочного комплекса - обеспечивает снятие и постановку автомобиля на парковочное место в автоматическом режиме, контроль над состоянием оборудования, оповещение о тревожных и аварийных ситуациях
.Под автоматическим режимом понимается инициируемая оператором, и далее, выполняемая по заложенному в систему управления алгоритму, процедура постановки или снятия автомобиля с парковочного места.
Состав АСУПК:
- терминал доступа
- шкафы автоматики
- периферийные устройства (датчики, исполнительные устройства, и т.д.)
Парковочный комплекс.
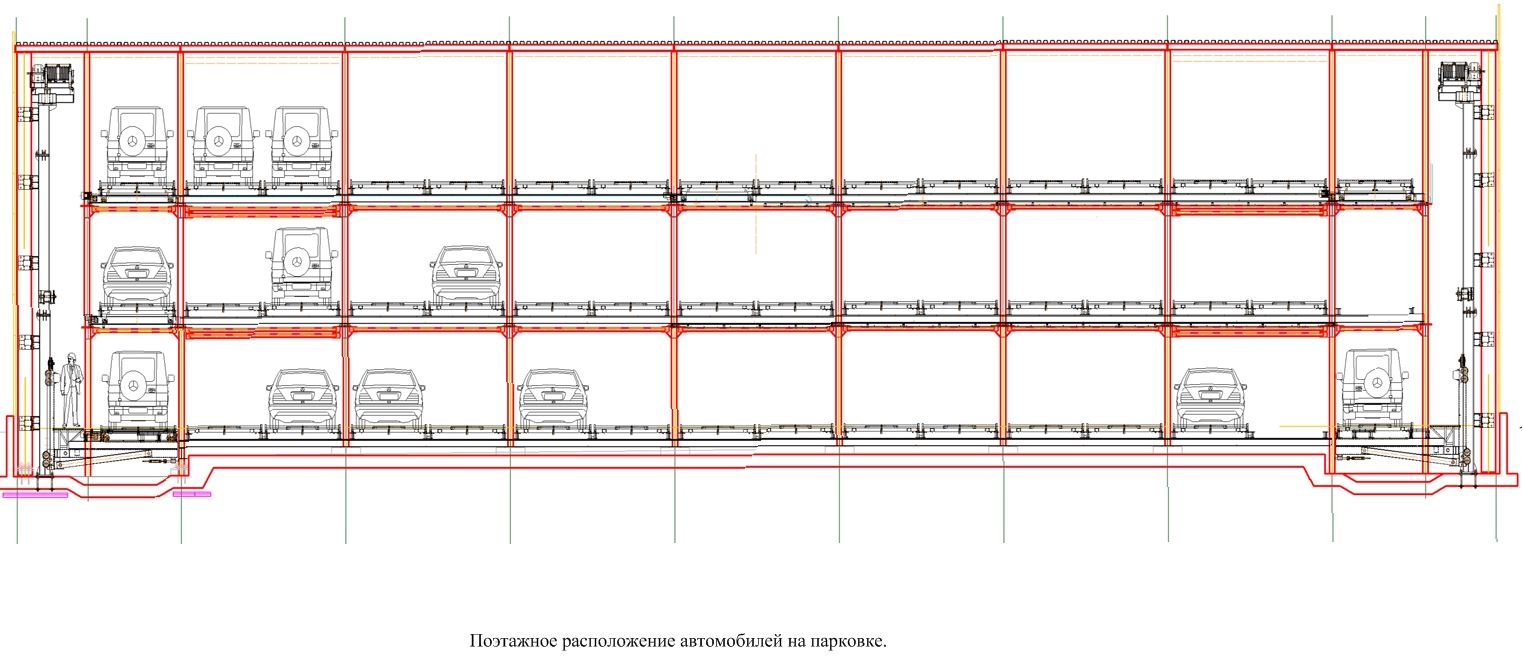
АСУПК обеспечивает управление продольным перемещением манипулятора (телега), поперечным перемещением платформы; вертикальным перемещением платформы; контроль наличия платформы на телеге; хранение информации о наличии автомобилей на платформах; оповещение персонала о возникновении аварийной ситуации; архивацию и хранение информации о состоянии и параметрах работы систем и оборудования, аварийных и нештатных ситуациях.
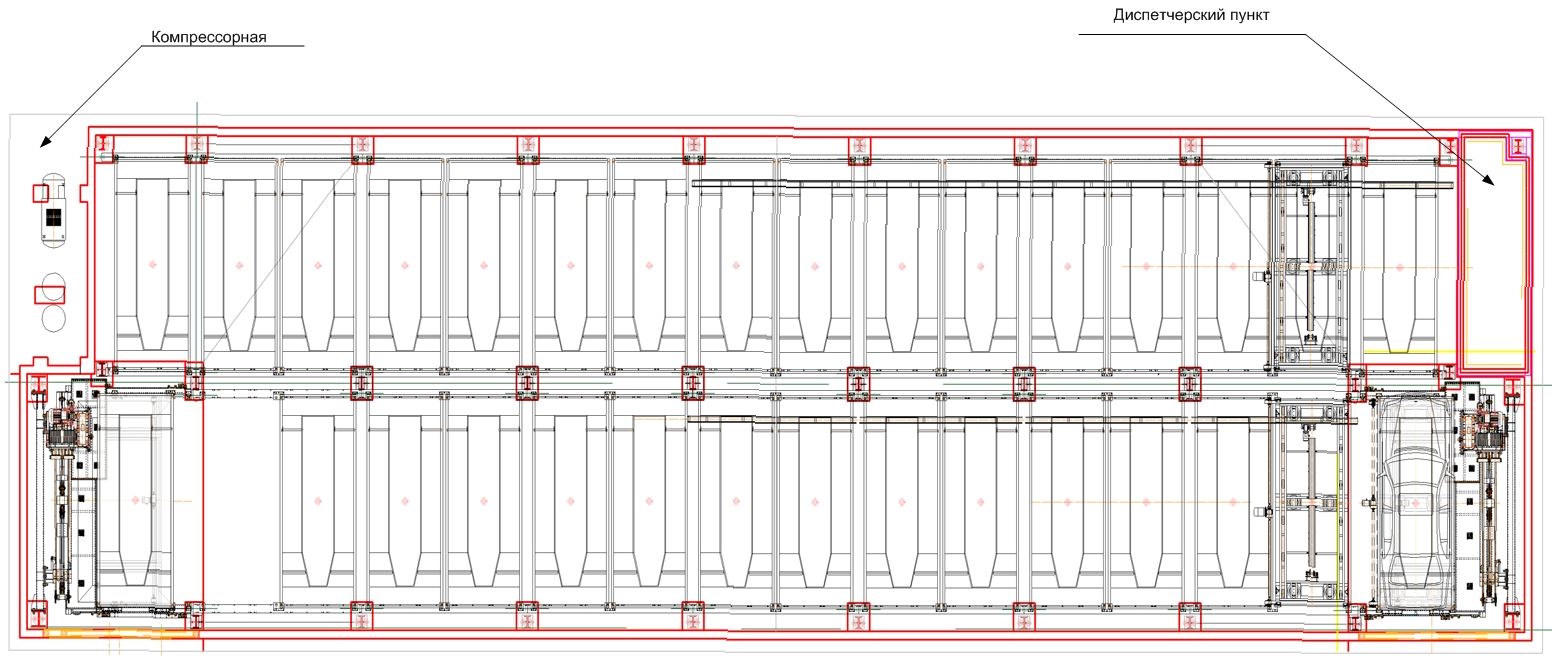
Управление продольным перемещением телеги (горизонтальное движение телеги по направляющим (рельсам) балочной клетки).
Для управления используются сигналы с инкрементального датчика, установленного на валу привода продольного перемещения. Реализовано полноценное позиционирование по абсолютной координате (ось продольного перемещения).
Управление поперечным перемещением платформы (горизонтальное движение платформы с одной телеги на другую по роликам).


Для управления используется информация от инкрементального датчика углового положения (энкодер), установленного на валу цепи поперечного перемещения. Индуктивный датчик, расположенный на телеге, служит для определения наличия на ней платформы. На валу двигателя расположена ременная передача, которая входит в зацепление с зубцами на нижней части платформы и перемещает платформу на принимающую телегу. Для управления используются 4 контрольные позиции. Первоначально платформа движется с максимальной скоростью. При достижении первой контрольной позиции включается двигатель цепи поперечного перемещения второй телеги. При достижении второй контрольной позиции отключается привод первой телеги. При достижении третьей контрольной происходит смена скорости перемещения платформы в сторону уменьшения, а при достижении четвертой контрольной позиции - платформа доходит до упора, второй двигатель цепи поперечного перемещения отключается. Конечные и промежуточные позиции платформы задаются в контроллере в виде массива констант или энергонезависимых переменных на этапе пуско-наладки. Контроллер управляет электроприводами дискретными сигналами, подаваемыми на входы преобразователей частоты. Скорость передачи платформы с одной телеги на другую задается преобразователями частоты, которые управляются аналоговыми выходами контроллера.
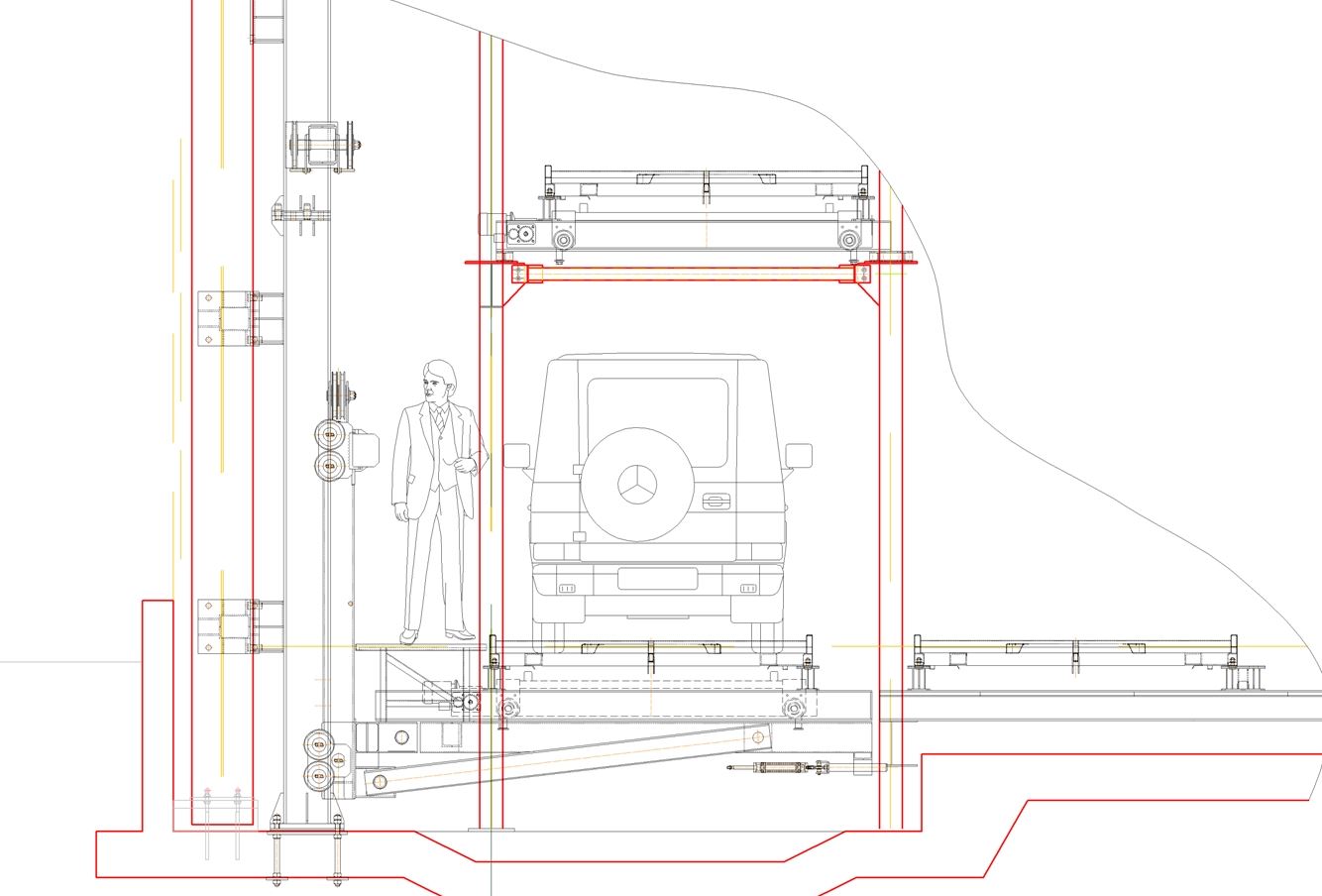
Управление вертикальным перемещением телеги (вертикальное движение подвижной части телеги совместно с установленной на роликах платформой или без нее) осуществляется при помощи пневмоподушек (6 шт), расположенных по обе стороны телеги. Верхнее и нежнее положения подвижной части телеги, контролируется датчиками и реле давления.
Подъем и спуск автомобиля на ярусы осуществляется при помощи подъемника.